8618566785362 8618566785362 8618566785362 phoenix08@bbamachine.com
- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

Views: 0 Author: BBA AUTOMATION Publish Time: 2025-06-22 Origin: BBA AUTOMATION








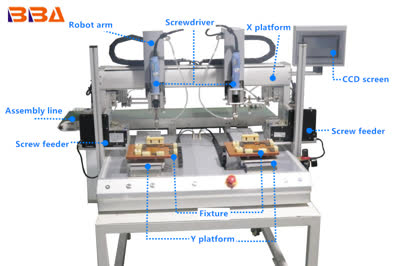
| Nume produs | Industrii aplicabile |
| Mașină Inteligentă de Șurubuit | Fabricația de Dispozitive Medicale |
Dansul delicat al manipulării vialelor de sticlă minuscule, a senzorilor electronici sofisticați sau a elementelor optice calibrate cu precizie reprezintă una dintre provocările persistente ale producției. Componentele fragile, predispuse la micro-fisuri, daune statice sau dezechilibre microscopice sub presiune ușoară, au cerut mult timp muncă manuală minuțioasă. Totuși, această abordare centrată pe om aduce cu sine variabilitate intrinsecă, limitări ale oboselii și riscuri de contaminație - deosebit de critice în industrii precum microelectronica, biotehnologia și fotonica, unde integritatea componentelor este primordială. Aici, unde o respirație sau o mână nesigură poate compromite luni de cercetare și dezvoltare, are loc o revoluție tăcută prin implementarea roboților de birou specializați.
Roboții moderni de birou, care ocupă un spațiu minim asemănător unei imprimante mici de birou, dar oferind capacități de nivel de laborator, abordează fragilitatea cu o finețe fără precedent. Principalul lor avantaj este controlul excepțional al mișcării: motoare pas cu pas sau servomotoare de înaltă rezoluție, ghidate de algoritmi sofisticați, permit traiectorii de mișcare precise la doar câțiva microni. Acest lucru elimină forțele laterale dăunătoare sau tensiunile de impact comune în timpul plasării manuale. Spre deosebire de brațele industriale solide adesea limitate la cuști de siguranță, aceste sisteme compacte operează cu actuatori inerent sigure, cu forțe scăzute, protejați prin proiectarea conformă și optiuni sensibile de detectare a forței care opresc instantaneu mișcarea la detectarea unei rezistențe neașteptate, de exemplu la inserarea unui preparat de sticlă fragil într-un suport.
Aplicațiile sunt transformatoare. În asamblarea microelectronică, roboții plasează cu minuțiozitate senzori MEMS sensibili la temperatură sau oscilatoare cu cuarț fragile pe plăcile cu circuite imprimate (PCB), aplicând cantități precise de adeziv conductor fără a îndoi sau a sublinia componentele. Laboratoarele farmaceutice le utilizează pentru dispersarea cu precizie a reactivelor în vialele HPLC ultrasubțiri, unde umplerea manuală induce spargere și risipă. Producătorii de componente fotonice se bazează pe ei pentru alinierea și fixarea lentilelor minuscule și a fibrelor optice în asamblări, menținând precizia critică la nivel nanometric pe care degetele umane nu o pot atinge în mod constant. Automatizarea cu roboți de birou nu doar protejează componenta; asigură și repetabilitatea procesului, crucială pentru o producție cu randament ridicat și raportarea riguroasă a asigurării calității.
Pentru o integrare cu succes a acestor roboți este necesară atenție la specificitățile materialelor și ale mediului. Sculele, de obicei ventuze sau micro-degete cu contact moale, trebuie alese cu atenție și supuse unor tratamente de texturare a suprafeței sau de disipare electrostatică pentru a evita deteriorarea substratelor – ceva la care sculele finale industriale standard rareori se gândesc. Controlul mediului este, de asemenea, critic: incorporarea unor platforme care atenuează vibrațiile asigură precizia de poziționare în laboratoarele cu trafic intens, iar închiderea spațiului de lucru atenuează perturbațiile cauzate de curenții de aer. În mod crucial, programatorii trebuie să ajusteze cu meticulozitate profilurile de mișcare – accelerația, viteza maximă, unghiurile de abordare – adesea folosind aterizări ușoare sau manevre de siguranță verificate prin testare iterativă, în special pentru materiale cu fragilitate unică. Acest nivel de programare detaliată valorifică precizia intrinsecă a robotului, transformând fragilitatea potențială în rezistență programabilă.
Privind spre viitor, sinergia dintre robotica de birou și inteligența artificială promite noi progrese. Sistemele viitoare ar putea folosi viziune artificială nu doar pentru poziționare, ci și pentru a detecta în timp real micro-fisuri sau deformații, adaptând parametrii de manipulare din mers. Controlul adaptiv al forței care utilizează modele de învățare profundă antrenate pe simulații de stres ale componentelor va crea comportamente de manipulare și mai blânde, conștiente de context. Această dexteritate automatizată depășește limitările manuale, descoperind tehnici de asamblare anterior imposibile pentru dispozitive medicale de ultimă generație sau componente cuantice, unde fragilitatea este bariera definitivă.
Evoluția roboticii de birou semnalează o schimbare fundamentală: manipularea componentelor delicate nu mai este constrânsă de limitele degetelor umane sau de automatizarea convențională. Prin stăpânirea micro-forjării mișcării precise, a presiunii controlate și a stabilității mediului, aceste platforme compacte transformă fragilitatea dintr-un blocaj de producție într-o variabilă gestionabilă. Aceasta îi împuternicește pe ingineri să depășească limitele, proiectând și fabricând dispozitive revoluționare construite pe fundații prea delicate pentru atingerea unei mâini, dar perfect adaptate preciziei delicate a unei mașini inteligente.



