8618566785362 8618566785362 8618566785362 phoenix08@bbamachine.com
- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

Views: 0 Author: BBA AUTOMATION Publish Time: 2025-06-22 Origin: BBA AUTOMATION








| Nazwa produktu | Odpowiednie branże |
| Inteligentna maszyna do wkręcania śrub | Produkcja urządzeń medycznych |
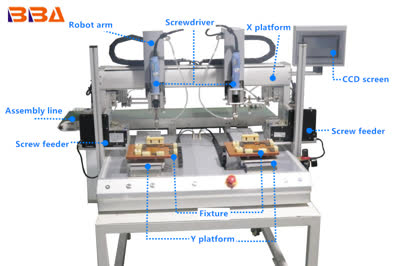
Delikatny taniec obsługi maleńkich szklanych fiolek, skomplikowanych czujników elektronicznych czy precyzyjnie skalibrowanych elementów optycznych stanowi jedno z trwałych wyzwań w produkcji. Delikatne komponenty, podatne na mikropęknięcia, uszkodzenia statyczne lub mikroskopijne przesunięcia pod niewielkim naciskiem, od dawna wymagały mozolnej pracy ręcznej. Jednak to podejście oparte na człowieku niesie ze sobą nieodłączne zmienności, ograniczenia związane ze zmęczeniem i ryzyko zanieczyszczeń – szczególnie krytyczne w branżach takich jak mikroelektronika, biotechnologia i fotoniczna, gdzie integralność komponentów ma priorytetowe znaczenie. Tutaj, gdzie oddech czy niestabilna dłoń mogą naruszyć miesiące prac badawczo-rozwojowych, rozgrywa się cicha rewolucja dzięki wdrożeniu specjalizowanych robotów stacjonarnych.
Współczesne roboty stacjonarne, zajmujące minimalną przestrzeń przypominającą małą drukarkę, lecz oferujące możliwości laboratoryjnej jakości, radzą sobie z delikatnością w bezprecedensowo finezyjny sposób. Ich podstawową zaletą jest wyjątkowa kontrola ruchu: wysoko rozdzielcze silniki krokowo lub serwo, sterowane zaawansowanymi algorytmami, umożliwiają ścieżki ruchu dokładne do zaledwie mikrometrów. Eliminuje to uszkadzające siły boczne lub naprężenia występujące przy uderzeniu, powszechne podczas ręcznego umieszczania. W przeciwieństwie do często ograniczonych do klatek bezpieczeństwa przemysłowych ramion o dużej sile, te kompaktowe systemy działają wykorzystując z natury bezpieczne, niskosiłowe siłowniki, chronione przez zaprojektowaną kompensację oraz opcje wrażliwego czujnika siły, które natychmiast zatrzymują ruch po wykryciu nieoczekiwanego oporu, na przykład przy wkładaniu delikatnej szklanej płytki do uchwytu.
Zastosowania są transformacyjne. W montażu mikroelektronicznym roboty skrupulatnie umieszczają wrażliwe na temperaturę czujniki MEMS lub delikatne oscylatory kwarcowe na płytkach PCB, nanosząc precyzyjne ilości kleju przewodzącego bez wyginania lub naprężania komponentów. Laboratoria farmaceutyczne wykorzystują je do dokładnego dozowania odczynników do niezwykle cienkich fiolek HPLC, gdzie ręczne napełnianie powoduje pękanie i marnotrawstwo. Producenci optoelektroniki polegają na nich przy wyrównywaniu i mocowaniu maleńkich soczewek oraz światłowodów w zespołach, utrzymując kluczową precyzję na poziomie nanometrów, której ludzkie palce nie potrafią osiągnąć w sposób spójny. Automatyzacja za pomocą robotów stacjonarnych nie tylko chroni komponent; zapewnia również powtarzalność procesu, kluczową dla produkcji o wysokiej wydajności i rygorystycznych raportów zapewnienia jakości.
Pomyślna integracja tych robotów wymaga uwzględnienia specyfiki materiałów i środowiska. Osprzęt, zazwyczaj chwytaki próżniowe lub mikropalce o miękkim kontakcie, musi być starannie dobrany i podlegać teksturowaniu powierzchni lub obróbce odprowadzającej elektryczność statyczną, aby uniknąć uszkodzenia podłoży – co jest aspektem rzadko rozważanym w standardowych końcówkach roboczych przemysłowych. Kontrola środowiska jest również krytyczna: włączenie platform tłumiących wibracje zapewnia dokładność pozycjonowania w ruchliwych laboratoriach, podczas gdy obudowa przestrzeni roboczej minimalizuje zakłócenia spowodowane przez prądy powietrza. Kluczowe jest, aby programiści skrupulatnie dostroili profile ruchu – przyspieszenie, maksymalną prędkość, kąty podejścia – często stosując miękkie lądowania lub ruchy zabezpieczone, zweryfikowane poprzez iteracyjne testy, szczególnie dla wyjątkowo kruchych materiałów. Ten poziom szczegółowego programowania wykorzystuje wrodzoną precyzję robota, przekształcając potencjalną delikatność w programowalną odporność.
Patrząc w przyszłość, synergia między robotyką stacjonarną a sztuczną inteligencją obiecuje dalsze przełomy. Przyszłe systemy mogłyby wykorzystywać wizję maszynową nie tylko do pozycjonowania, ale również do automatycznego wykrywania mikropęknięć lub wykrzywiania w czasie rzeczywistym, dynamicznie dostosowując parametry obsługi. Adaptacyjna kontrola siły przy użyciu modeli głębokiego uczenia trenowanych na symulacjach naprężeń komponentów stworzy jeszcze łagodniejsze, dostosowane do kontekstu zachowania w zakresie obsługi. Ta zautomatyzowana zręczność przekracza manualne ograniczenia, odblokowując wcześniej niemożliwe techniki montażu dla urządzeń medycznych przyszłej generacji lub komponentów kwantowych, gdzie delikatność jest kluczową barierą.
Ewolucja robotyki stacjonarnej oznacza fundamentalną zmianę: obsługa delikatnych komponentów nie jest już ograniczona przez ograniczenia ludzkich palców czy konwencjonalnej automatyzacji. Opanowując mikrowarsztat precyzyjnego ruchu, kontrolowanego nacisku i stabilności środowiskowej, te kompaktowe platformy przekształcają kruchość z wąskiego gardła produkcyjnego w zmienną podatną na zarządzanie. To uprawnia inżynierów do przesuwania granic, projektując i wytwarzając rewolucyjne urządzenia zbudowane na fundamentach zbyt delikatnych dla dotyku dłoni, ale idealnie dopasowanych do delikatnej precyzji inteligentnej maszyny.