8618566785362 8618566785362 8618566785362 phoenix08@bbamachine.com
- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

Views: 0 Author: BBA AUTOMATION Publish Time: 2025-06-22 Origin: BBA AUTOMATION








| Productnaam | Toepasbare industrieën |
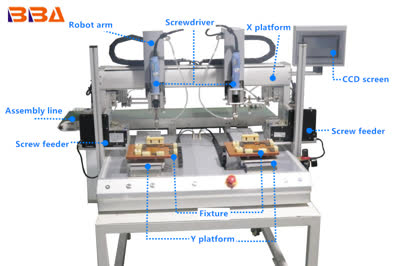
| Smart Screw Driving Machine | Medische apparatuurproductie |
Het delicate werk van het hanteren van kleine glazen flesjes, ingewikkelde elektronische sensoren of precies gekalibreerde optische componenten vormt een van de hardnekkige uitdagingen in de productie. Kwetsbare onderdelen, gevoelig voor micro-scheurtjes, schade door statische elektriciteit of microscopische misalignering bij minimale druk, vereisten lange tijd uiterst nauwkeurig handwerk. Deze mensgerichte aanpak brengt echter inherente variabiliteit, beperkingen door vermoeidheid en risico's op vervuiling met zich mee - kritiek in sectoren zoals micro-elektronica, biotech en fotonica, waar onderdeelintegriteit van cruciaal belang is. Hier, waar een ademtocht of een onstabiele hand maanden R&D kan compromitteren, ontvouwt zich een stille revolutie door de inzet van gespecialiseerde desktoprobots.
Moderne desktoprobots, met een minimale vloeroppervlakte vergelijkbaar met een kleine desktopprinter maar uitgerust met laboratoriumkwaliteit, adresseren kwetsbaarheid met ongekende gratie. Hun bepalende voordeel is uitzonderlijke bewegingscontrole: hoogresolutie stappen- of servomotoren, aangestuurd door geavanceerde algoritmen, maken bewegingspaden mogelijk met een nauwkeurigheid van slechts micrometers. Dit elimineert beschadigende zijwaartse krachten of impaxtkrachten die vaak voorkomen bij handmatige plaatsing. Anders dan op brute kracht werkende industriële armen die vaak in veiligheidskooien staan, werken deze compacte systemen met inherent veilige actuators met lage kracht, beschermd door ontworpen compliantie en gevoelige krachtopties die de beweging onmiddellijk stoppen bij het detecteren van onverwachtse weerstand, bijvoorbeeld bij het invoegen van een kwetsbaar glaasje in een houder.
De toepassingen zijn transformerend. Bij micro-elektronicamontage plaatsen robots uiterst zorgvuldig temperatuurgevoelige MEMS-sensoren of kwetsbare kristaloscillatoren op printplaten, waarbij precieze hoeveelheden geleidende lijm worden aangebracht zonder onderdelen te buigen of te belasten. Farmaceutische laboratoria benutten ze voor het nauwkeurig doseren van reagentia in ultradunne HPLC-flesjes, waar handmatig vullen tot breuk en afval leidt. Fotonicafabrikanten vertrouwen op ze voor het uitlijnen en bevestigen van minuscule lenzen en glasvezels in assemblage, waarbij kritische nanometernauwkeurigheid wordt gehandhaafd die menselijke vingers niet consistent kunnen bereiken. Automatisering met desktoprobots beschermt niet alleen het onderdeel; het garandeert procesherhaalbaarheid, cruciaal voor hoge productieopbrengst en strikte kwaliteitsrapportage.
Het succesvol integreren van deze robots vereist aandacht voor materiaal- en omgevingsspecifieke aspecten. Gereedschappen, meestal vacuümgrijpers of zachte-contact micro-vingers, moeten zorgvuldig worden geselecteerd en ondergaan oppervlaktetexturering of elektrostatische ontladingsbehandelingen om beschadiging van substraten te voorkomen – iets waar standaard industriële eindeffectors zelden rekening mee houden. Omgevingscontrole is ook kritiek: het incorporeren van tril-absorberende platforms garandeert positionerinznauwkeurigheid in drukke laboratoria, terwijl het huisvesten van de werkruimte verstoringen door luchstromen beperkt. Cruciaal is dat programmeurs bewegingsprofielen nauwkeurig moeten afstellen – versnelling, maximale snelheid, aanloopangles – waarbij vaak gebruik wordt gemaakt van zachte landingen of bewaakte bewegingen die via iteratieve tests worden geverifieerd, vooral voor uniek brosse materialen. Dit detailniveau in programmering benut de inherente precisie van de robot en transformeert potentiële broosheid in programmeerbare veerkracht.
Vooruitkijkend belooft de synergie tussen desktoprobotics en kunstmatige intelligentie verdere doorbraken. Toekomstige systemen kunnen machine vision gebruiken, niet alleen voor positionering, maar ook om micro-breukjes of vervormingen in real-time automatisch te detecteren en handelingsparameters on-the-fly aan te passen. Adaptieve krachtregeling met deep learning-modellen getraind op simulaties van onderdeelspanningen zal nog zachtere, contextbewuste hanteringsgedragingen creëren. Deze geautomatiseerde behendigheid overstijgt menselijke beperkingen en maakt voorheen onmogelijke montagetechnieken mogelijk voor medische apparaten van de volgende generatie of kwantumcomponenten waar broosheid de bepalende barrière is.
De evolutie van desktoprobots markeert een fundamentele verschuiving: het hanteren van delicate componenten wordt niet langer beperkt door de grenzen van menselijke vingers of conventionele automatisering. Door de micromanipulatie van precieze beweging, gecontroleerde druk en omgevingsstabiliteit te beheersen, transformeren deze compacte platforms broosheid van een productieknelpunt naar een beheersbare variabele. Dit stelt ingenieurs in staat om grenzen te verleggen, revolutionaire apparaten te ontwerpen en te fabriceren die gebouwd zijn op fundamenten te teer voor de aanraking van een hand, maar perfect geschikt voor de zachte precisie van een intelligente machine.



