8618566785362 8618566785362 8618566785362 phoenix08@bbamachine.com
- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

Views: 0 Author: BBA AUTOMATION Publish Time: 2025-06-22 Origin: BBA AUTOMATION








| 제품 이름 | 적용 산업 |
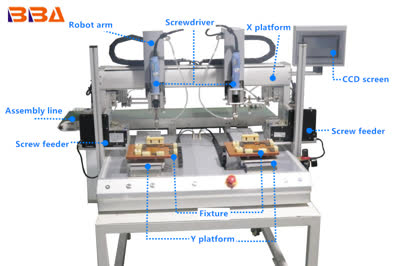
| 스마트 드라이빙 머신(Smart Screw Driving Machine) | 의료기기 제조 |
작은 유리 바이알, 정교한 전자 센서, 또는 정밀하게 조정된 광학 소자를 다루는 섬세한 작업은 제조업에서 항상 짊어져 온 도전 과제입니다. 미세 균열, 정전기 손상, 약간의 압력에도 발생할 수 있는 미세한 정렬 불량에 취약한 부품들은 오랫동안 고통스러운 수작업을 필요로 해왔습니다. 그러나 이런 인간 중심 접근법은 본질적인 가변성, 피로도 한계, 오염 위험을 동반합니다 – 특히 부품의 무결성이 가장 중요한 마이크로일렉트로닉스, 바이오테크, 광학기기(포토닉스) 산업에서 더욱 치명적입니다. 숨결이나 불안정한 손으로도 수개월 간의 연구 개발(R&D)이 무너질 수 있는 이러한 분야에서, 특수화된 데스크탑 로봇의 도입을 통한 조용한 혁신이 펼쳐지고 있습니다.
현대적인 데스크탑 로봇은 소형 데스크탑 프린터와 마찬가지로 최소한의 공간을 차지하면서도 실험실 등급의 성능을 제공하여 미세한 취약성을 전례 없는 섬세함으로 다룹니다. 그들의 결정적인 장점은 탁월한 모션 제어력입니다: 고해상도 스테퍼 또는 서보 모터는 정교한 알고리즘의 지도를 받아 불과 수 마이크로미터(micrometer) 단위의 정확도로 경로를 이동할 수 있습니다. 이는 수동 배치 시 흔한 손상을 초래하는 측면 힘이나 충격 응력을 제거합니다. 강력한 힘을 사용할 수밖에 없어 안전 케이지에 가둬야 하는 산업용 로봇 팔과 달리, 이 컴팩트한 시스템은 고유의 안전성이 보장되고 낮은 힘을 가하는 작동기를 통해 작동하며, 설계된 유연성과 예기치 않은 저항 감지 시 즉시 동작을 중단시키는 감도 높은 힘 감지 옵션으로 보호됩니다. 예를 들어 취약한 유리 슬라이드를 홀더에 삽입할 때 발생할 수 있는 문제를 방지합니다.
이 로봇들의 적용 사례는 혁신적입니다. 마이크로일렉트로닉스 조립 공정에서는 로봇이 민감한 온도에 반응하는 MEMS 센서나 취약한 크리스탈 오실레이터를 인쇄 회로 기판(PCB) 위에 정밀하게 배치하며, 부품을 구부리거나 스트레스를 가하지 않는 선에서 정확한 양의 도전성 접착제를 도포합니다. 제약 연구실에서는 얇은 HPLC 바이알에 시약을 정확하게 분배하는 데 활용합니다. 여기서 수작업 충전은 파손과 폐기를 유발합니다. 광학기기(포토닉스) 제조업체들은 미세한 렌즈와 광섬유 조립체에 넣어 정렬하고 고정하는 데 의존하며, 인간 손가락이 일관되게 달성할 수 없는 수 나노미터(nanometer) 수준의 중요한 정밀도를 유지합니다. 데스크탑 로봇을 활용한 자동화는 단순히 부품을 보호하는 것을 넘어 고수율 생산과 엄격한 품질 보증(QA) 보고를 위한 핵심인 공정 반복성을 보장합니다.
이런 로봇들을 성공적으로 통합하려면 재료 및 환경 특수성을 세심하게 주의해야 합니다. 툴링(공구), 일반적으로 진공 그리퍼나 소프트 콘택트 마이크로 핑거는 기판을 손상시키지 않도록 피해야 하는 표면 텍스처링이나 정전기 방지 처리를 해야 하며, 신중하게 선택되어야 합니다. 이는 일반적인 산업용 엔드 이펙터는 거의 고려하지 않는 부분입니다. 환경 제어 역시 중요합니다: 진동 감쇠 플랫폼을 도입하면 혼잡한 연구실 환경에서도 위치 정확도를 보장할 수 있으며, 작업 공간을 독립 시설로 구성하면 기류로 인한 방해를 줄일 수 있습니다. 무엇보다도 작업자는 가속도, 최대 속도, 접근 각도와 같은 모션 프로파일을 꼼꼼하게 조정해야 하며, 종종 특히 독특하게 취성인(brittle) 재료들을 위해 반복적인 테스트를 통해 검증된 소프트 랜딩이나 가디드 무브(guarded move)를 사용합니다. 이 정도의 상세한 프로그래밍은 로봇의 고유한 정밀도를 활용하여 잠재적 취약성을 프로그램 가능한 회복력으로 전환합니다.
앞으로 데스크탑 로보틱스와 인공 지능 간의 시너지는 더욱 급속한 발전을 약속합니다. 미래 시스템은 단순한 위치 파악을 넘어 실시간으로 미세 균열이나 휨을 자동 감지하고, 핸들링 매개변수를 실시간으로 조정할 수 있는 머신 비전을 활용할 수 있을 것입니다. 부품 응력 시뮬레이션으로 훈련된 딥 러닝 모델을 사용하는 적응형 힘 제어는 훨씬 더 부드럽고 문맥을 인지하는 핸들링 동작을 만들어낼 것입니다. 이러한 자동화된 민첩성은 수동 작업의 한계를 뛰어넘어, 취약성이 주요 장벽인 차세대 의료 기기나 양자(quantum) 부품을 위한 이전에는 불가능했던 조립 기술을 열어줄 것입니다.
데스크탑 로보틱스의 진화는 근본적인 전환을 의미합니다: 취약한 부품 핸들링은 더 이상 인간 손가락이나 기존 자동화 방식의 한계에 제약받지 않습니다. 정밀한 움직임, 통제된 압력 및 환경 안정성의 '마이크로 포지'(micro-forge)를 마스터함으로써, 이 컴팩트한 플랫폼들은 생산 병목현상인 취약성(취성)을 관리 가능한 변수로 변환합니다. 이는 엔지니어가 경계를 넓힐 수 있는 힘을 주어, 손의 접촉에는 너무 섬세하지만 지능형 기계의 부드러운 정밀도에는 완벽히 적합한 기반 위에 세워진 혁명적인 장치들을 설계하고 제조할 수 있게 합니다.



