8618566785362 8618566785362 8618566785362 phoenix08@bbamachine.com
- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

Views: 0 Author: BBA AUTOMATION Publish Time: 2025-06-22 Origin: BBA AUTOMATION








| Produktnavn | Anvendelige industrier |
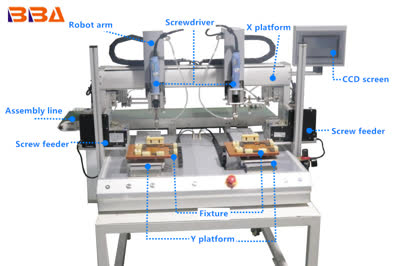
| Smart Skruedrivemaskine | Fremstilling af medicinsk udstyr |
Den delikate dans ved håndtering af små glasampuller, komplekse elektroniske sensorer eller præcist kalibrerede optiske komponenter repræsenterer en af vedvarende udfordringer i fremstillingen. Skrøbelige komponenter, der er modtagelige over for mikrorifter, statiske skader eller mikroskopiske fejljusteringer under let tryk, har længe krævet omhyggeligt manuelt arbejde. Men denne menneskecentrerede tilgang medfører iboende variationer, begrænsninger på grund af træthed og risici for forurening – især afgørende i industrier som mikroelektronik, bioteknologi og fotonik, hvor komponentintegritet er altafgørende. Her, hvor et åndedrag eller en ustabil hånd kan kompromittere måneders forskning og udvikling, udfolder sig en stille revolution gennem implementeringen af specialiserede skrivebordsrobotter.
Moderne skrivebordsrobotter, der optager minimal gulvplads svarende til en lille skrivebordsprinter, men som tilbyder laboratorieklasses funktionalitet, adresserer skrøbeligheden med hidtil uset finesse. Deres afgørende fordel er enestående bevægelseskontrol: højopløste trin- eller servomotorer, styret af sofistikerede algoritmer, muliggør bevægelsesbaner med en nøjagtighed på kun mikrometer. Dette eliminerer skadelige sidelænskræfter eller stødpåkænnelser, som er almindelige under manuel placering. I modsætning til råstærke industrielle arme, der ofte er indespærret i sikkerhedsbure, opererer disse kompakte systemer med iboende sikre, lavkræftsaktuatorer, beskyttet af designet omgivelseskontrol og følsomme kraftfølerindstillinger, der øjeblikkeligt stopper bevægelsen, når de registrerer uventet modstand, for eksempel når man indfører et skrøbeligt glasobjektdias i en holder.
Anvendelserne er transformerende. I samling af mikroelektronik placerer robotter omhyggeligt temperaturemfølsomme MEMS-sensorer eller skrøbelige krystaloscillatorer på printplader, påfører præcise mængder ledende lim uden at bøje eller stresse komponenterne. Farmaceutiske laboratorier udnytter dem til at dosere reagens præcist i ultratynde HPLC-kolber, hvor manuel fyldning medfører knusning og spild. Fotonikfremstillere er afhængige af dem til at justere og sikre minuskule linser og fiberoptik i samlinger, opretholder kritisk nanometerpræcision, som menneskets fingre ikke konsekvent kan opnå. Automatisering med skrivebordsrobotter beskytter ikke kun komponenten; den sikrer procesgentagelighed, afgørende for højudbytteproduktion og streng kvalitetssikringsrapportering.
Vellykket integration af disse robotter kræver opmærksomhed på materialspecifikationer og omgivelsesforhold. Værktøjer, typisk vakuumgribere eller blød-kontakt mikro-fingre, skal omhyggeligt udvælges og gennemgår overfladeteksturering eller behandling mod elektrostatisk afladning for at undgå at beskadige underlag – noget standard industrielle ende-effektorer sjældent tager i betragtning. Omgivelseskontrol er også afgørende: inkorporering af vibrationsdæmpende platforme sikrer positionsnøjagtighed i højtrafikerede laboratorier, mens indkapsling af arbejdsområdet minimerer forstyrrelser fra luftstrømme. Afgørende er, at programmører omhyggeligt skal indstille bevægelsesprofiler – acceleration, maksimal hastighed, indfaldsvinkler – ofte ved at anvende bløde landinger eller bevægelser med integreret beskyttelse, der verificeres gennem iterativ testning, især for unikke sprøde materialer. Dette detaljeringsniveau i programmeringen udnytter robotternes iboende præcision og transformerer potentiel skrøbelighed til programmerbar robusthed.
Med et blik mod fremtiden lover synergien mellem skrivebordsrobotter og kunstig intelligencering yderligere gennembrud. Fremtidige systemer kunne benytte maskinsyn ikke kun til positionering, men også til automatisk at detektere mikro-revner eller forvridninger i realtid og tilpasse håndteringsparametre under arbejde. Adaptiv kraftkontrol ved brug af dyb læring-modeller trænet på komponentstres-simuleringer vil skabe endnu blidere, kontekstbevidste håndteringsadfærd. Denne automatiserede fingerfærdighed overskrider manuelle begrænsninger og muliggør hidutil umulige samlemetoder til næste generations medicinske enheder eller kvantekomponenter, hvor skrøbelighed er den definerende barriere.
Udviklingen af skrivebordsrobotter betyder et fundamentalt skift: håndtering af skrøbelige komponenter er ikke længere begrænset af menneskelige fingres grænser eller konventionel automatisering. Ved at mestre mikro-smedjen med præcis bevægelse, kontrolleret tryk og omgivelsesstabilitet transformerer disse kompakte platforme skrøbelighed fra en produktionsflaskehals til en håndterbar variabel. Dette giver ingeniører mulighed for at presse grænserne og designe og fremstille revolutionerende enheder, bygget på fundamenter, der er for skrøbelige til en hånds berøring, men perfekt egnede til en intelligent maskines blide præcision.



